|
Lingyu (Tom) Xiao Hi there! I am currently a PhD student at The University of Hong Kong (HKU), supervised by Prof. Xintao Yan. I obtained my MSc in Control Science and Engineering from Southeast University in 2025, supervised by Prof. Wankou Yang.My research interests lie in: ► Realistic world model in autonomous driving. ► Perception & decision-making in autonomous driving and robotics. ► Multi-modal machine learning (e.g., vision and language). Lots of my projects during undergraduate are focus on embedded systems in robotics (ROS, gazebo, etc.), you can find them here. Feel free to contact me by email if you are interested in discussing or collaborating with me.
lingyu.xiao@connect.hku.hk
/
tom.xiao105@gmail.com
|

@Grindelwald, Switzerland |
|
|
|
*Equal contribution. Some papers are highlighted. |
Multi-modal Machine Learning |
|
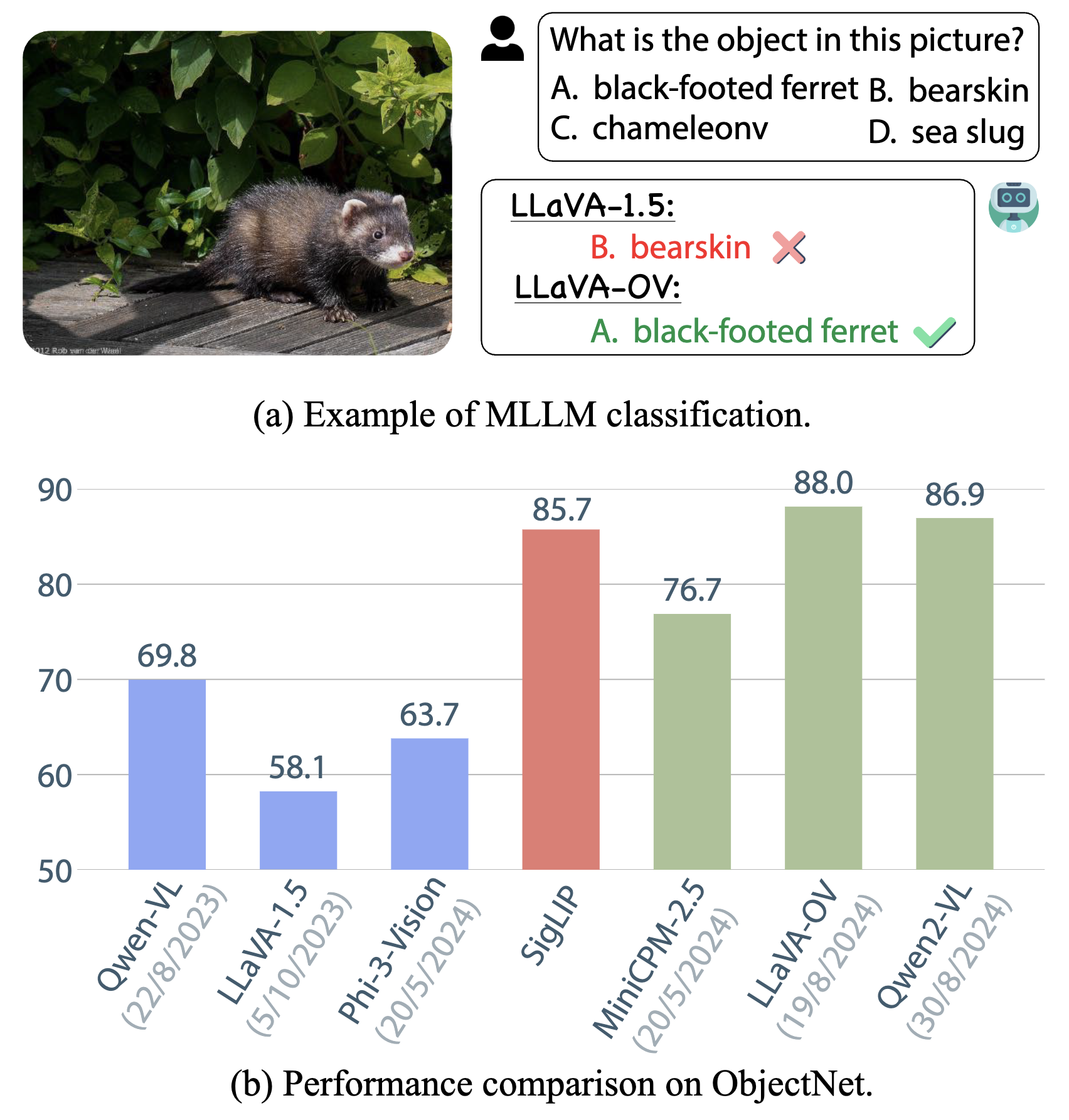
Huan Liu*, Lingyu Xiao*, Jiang-jiang Liu, Xiaofan Li, Ze Feng, Sen Yang, Jingdong Wang. Preprint, Arxiv , 2024 Paper Why some VLMs are bad at image classification while others are not? |
Decision-Making in Autonomous Driving |
|
Lingyu Xiao, Jiang-jiang Liu, Sen Yang, Xiaofan Li, Xiaoqing Ye, Wankou Yang, Jingdong Wang. International Conference on Robotics and Automation (ICRA), 2025 Paper / Page / Code Deriving decisions from an autoregressive latent world model through multiple probabilistic hypotheses. Expert-level performance on Waymax. |
|
|
Lingyu Xiao, Jiang-jiang Liu, Xiaoqing Ye, Wankou Yang, Jingdong Wang. Technical Report , 2024 Paper / Supp. Videos Training strategies, data efficiency, and robust evaluation are equally important in learning based planner. |
Perception in Autonomous Driving & Robotics |
|
Lingyu Xiao, Jinhui Wu, Junjie Hu, Ziyu Li, Wankou Yang. Pattern Recognition (PR), 2025 Addressesing the UDA problem in depth completion based on a domain/structural-agnostic property. |
|
|
Lingyu Xiao, Xiang Li, Sen Yang, Wankou Yang. International Conference on Computer Vision (ICCV), 2023 Paper / Poster / Code Making the line anchor learnable in anchor-based lane detection methods. Achieving SOTA on VIL-100. |
|
|
|
RoboCup Competition, 2021 National 1st Prize in Robot Tourism Group Techniques: Electronic design, Mechanical Design, Control, Computer Vision Full Video The project requires robots to complete exploration and treasure-hunting tasks within 180 seconds, testing planning, adaptability, positioning, climbing, and obstacle-crossing abilities, while balancing speed and stability. |
|
|
University Students Intelligent Car Race, 2021 National 3rd Prize in Creative Group Techniques: Computer Vision, Mechanical Design, Control Full Video / Technical Report (Chinese) The competition requires smart cars to follow the lane, identify specific markers, and complete tasks. Finishing is marked by crossing the finish line, and teams are ranked based on total score and time. |
|
|
Course Project Techniques: SLAM, Computer Vision The drone needs to navigate through the unknown maze and land safely. |
|
|

|
Oct. 2023 - Nov. 2024 (On-site, several months remote for unfinished projects) Department of Computer Vision Technology (VIS) Research intern hosted by Dr. Jiang-jiang Liu. |
|
|
Jun. 2021 - Aug. 2021 (On-site) Centre for Intelligent Robots Undergraduate research intern with CUHK(SZ) hosted by Dr. Junjie Hu. |
|
|
|
|
|
|