Motivation
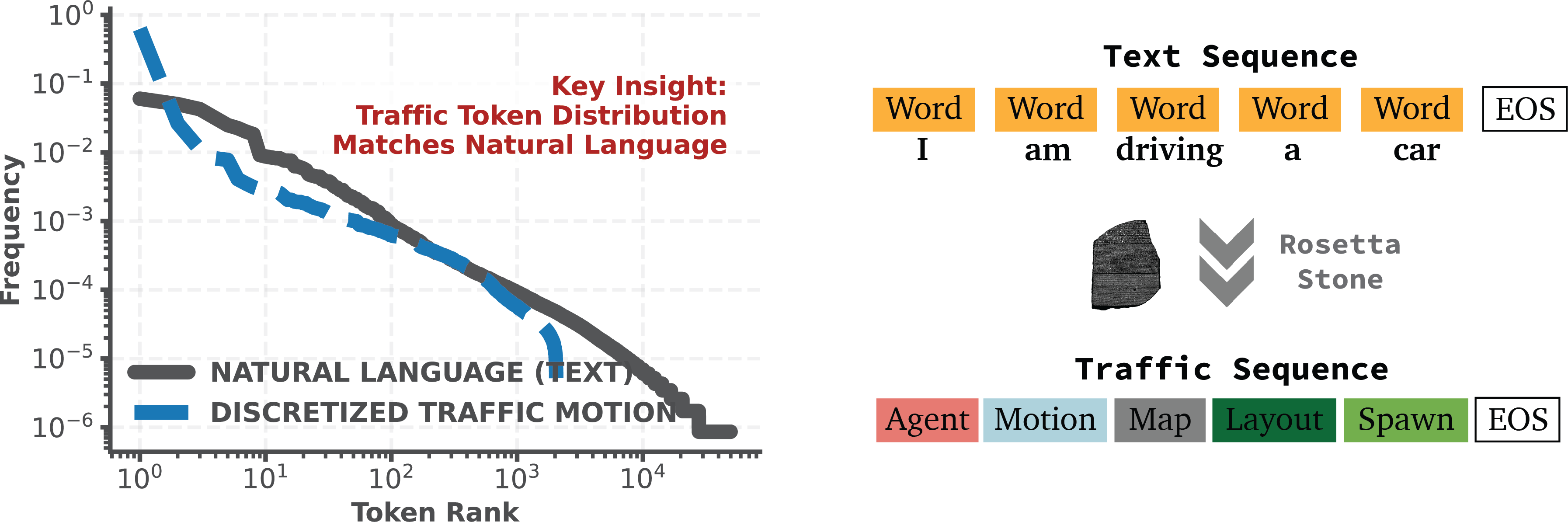
Why do LLM priors transferable to traffic?
Two empirical observations motivate RosettaSim: traffic motion tokens exhibit Zipf-like statistics similar to language, and even small frozen or heavily constrained LLMs adapt quickly to traffic motion modeling. Together, these results suggest that pretrained LLMs provide a useful sequence prior beyond language.